Water pump
Slider-Crank Mechanism
Introduction
This tutorial uses Water pump as an example to teach the kinematic and dynamic analysis using Solid Edge and Dynamic Designer.
|
|
|
|
Water pump |
Slider-Crank Mechanism |
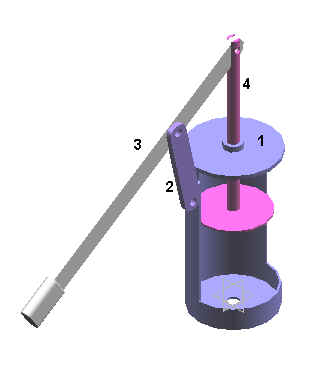
The mechanism used in this example is simple Slider-Crank Mechanism. Slider-Crank Mechanism consists of four links with one being designated as frame (or ground). It is connected by three pin joints and one sliding joints.
As designated in the figure, there are four links link 1, link 2, link 3 and link 4. Link 2 acts as a crank. Link 3 acts as connecting link, link 4 is the slider and link 1 is ground.
The following table summarizes the joints.
|
Joint
Number |
Formed
between links |
Joint
type |
|
1 |
Link 4 and Link 1 |
Translational
or (Slider) |
|
2 |
Link 1 and Link 2 |
Revolute
(or Pin) |
|
3 |
Link 2 and Link 3 |
Revolute
(or Pin) |
|
4 |
Link 3 and Link 4 |
Revolute
(or Pin) |
![]()
n = total number of links in a mechanism
![]() = total number of primary joints
(pins or sliders)
= total number of primary joints
(pins or sliders)
![]() = total number of higer-order
joints(cams or gears)
= total number of higer-order
joints(cams or gears)
we have,
F = 3(4-1) – 2(3+1) – 0
= 9 – 8 - 0
= 1.
Hence, Slider Crank mechanism has 1 DOF. In other words, Slider Crank mechanism is constrained or fully operated with one driver.
Click here to get the compressed (Solid Edge) part files.